HMM
隐马尔科夫模型
介绍
HMM可以看做是处理序列模型的传统方法。 一般来说HMM解决三个问题:
- 评估观察序列概率。给定模型\(\lambda=(A,B,\prod)\)和观察序列\(O=\\{o_1,o_2,\dots,o_T\\}\),计算在模型\(\lambda\)下观测序列O出现的概率\(P(O\lvert \lambda)\),这个问题需要用到前向后向算法,属于三个问题中最简单的。
- 预测问题,也叫解码问题。即给定模型\(\lambda = (A,B,\prod)\)和观测序列\(O=\\{o_1,o_2,\dots,o_T\\}\),求在给定观测序列条件下,最可能出现的对应的状态序列,这个问题的求解需要用到基于动态规划的维特比算法,这个问题属于三个问题中复杂度居中的算法。
- 模型参数学习问题。即给定观测序列\(O=\\{o_1,o_2,\dots,o_T\\}\),估计模型\(\lambda = (A,B,\prod)\)的参数,使得该模型下观测序列的条件概率\(P(O\lvert\lambda)\)最大,这个问题的求解需要用到基于EM算法的鲍姆-韦尔奇算法。属于三个问题中最复杂的。
定义
设 \(Q\) 是所有可能的状态的集合, \(V\) 是所有可能的观测的集合:
\[ Q=\left\{q_1, q_2, \cdots, q_N\right\}, \quad V=\left\{v_1, v_2, \cdots, v_M\right\} \]
其中, \(N\) 是可能的状态数, \(M\) 是可能的观测数。 \(I\) 是长度为 \(T\) 的状态序列, \(O\) 是对应的观测序列:
\[ I=\left(i_1, i_2, \cdots, i_T\right), \quad O=\left(o_1, o_2, \cdots, o_T\right) \]
\(A\) 是状态转移概率矩阵:
\[ A=\left[a_{i j}\right]_{N \times N} \]
其中,
\[ a_{i j}=P\left(i_{t+1}=q_j \mid i_t=q_i\right), \quad i=1,2, \cdots, N ; \quad j=1,2, \cdots, N \]
是在时刻 \(t\) 处于状态 \(q_i\) 的条件下在时刻 \(t+1\) 转移到状态 \(q_j\) 的概率。 \(B\) 是观测概率矩阵:
\[ B=\left[b_j(k)\right]_{N \times M} \]
其中,
\[ b_j(k)=P\left(o_t=v_k \mid i_t=q_j\right), \quad k=1,2, \cdots, M ; \quad j=1,2, \cdots, N \]
是在时刻 \(t\) 处于状态 \(q_j\) 的条件下生成观测 \(v_k\) 的概率。 \(\pi\) 是初始状态概率向量:
\[ \pi=\left(\pi_i\right) \]
其中,
\[ \pi_i=P\left(i_1=q_i\right), \quad i=1,2, \cdots, N \]
是时刻 \(t=1\) 处于状态 \(q_i\) 的概率。 隐马尔可夫模型由初始状态概率向量 \(\pi\) 、状态转移概率矩阵 \(A\) 和观测概率矩阵 \(B\) 决定。 \(\pi\) 和 \(A\) 决定状态序列, \(B\) 决定观测序列。因此, 隐马尔可夫模型 \(\lambda\) 可以用三元 符号表示, 即
\[ \lambda=(A, B, \pi) \]
\(A, B, \pi\) 称为隐马尔可夫模型的三要素。
状态转移概率矩阵 \(A\) 与初始状态概率向量 \(\pi\) 确定了隐藏的马尔可夫链, 生成不 可观测的状态序列。观测概率矩阵 \(B\) 确定了如何从状态生成观测, 与状态序列综合确 定了如何产生观测序列。
两个基本假设
- 齐次马尔可夫性假设, 即假设隐藏的马尔可夫链在任意时刻 \(t\) 的状态只依赖 于其前一时刻的状态, 与其他时刻的状态及观测无关, 也与时刻 \(t\) 无关:
\[ P\left(i_t \mid i_{t-1}, o_{t-1}, \cdots, i_1, o_1\right)=P\left(i_t \mid i_{t-1}\right), \quad t=1,2, \cdots, T \]
- 观测独立性假设, 即假设任意时刻的观测只依赖于该时刻的马尔可夫链的状 态, 与其他观测及状态无关:
\[ P\left(o_t \mid i_T, o_T, i_{T-1}, o_{T-1}, \cdots, i_{t+1}, o_{t+1}, i_t, i_{t-1}, o_{t-1}, \cdots, i_1, o_1\right)=P\left(o_t \mid i_t\right) \]
观测序列生成的过程
输入: 隐马尔可夫模型 \(\lambda=(A, B, \pi)\), 观测序列长度 \(T\); 输出: 观测序列 \(O=\left(o_1, o_2, \cdots, o_T\right)\) 。 (1) 按照初始状态分布 \(\pi\) 产生状态 \(i_1\); (2) 令 \(t=1\); (3) 按照状态 \(i_t\) 的观测概率分布 \(b_{i_t}(k)\) 生成 \(o_t\) : (4) 按照状态 \(i_t\) 的状态转移概率分布 \(\left\{a_{i_t i_{t+1}}\right\}\) 产生状态 \(i_{t+1}, i_{t+1}=1,2, \cdots, N\); (5) 令 \(t=t+1\); 如果 \(t<T\), 转步 (3); 否则, 终止。
概率计算问题
直接计算(复杂度太高)
给定模型 \(\lambda=(A, B, \pi)\) 和观测序列 \(O=\left(o_1, o_2, \cdots, o_T\right)\), 计算观测序列 \(O\) 出现 的概率 \(P(O \mid \lambda)\) 。最直接的方法是按概率公式直接计算。通过列举所有可能的长度为 \(T\) 的状态序列 \(I=\left(i_1, i_2, \cdots, i_T\right)\), 求各个状态序列 \(I\) 与观测序列 \(O=\left(o_1, o_2, \cdots, o_T\right)\) 的联合概率 \(P(O, I \mid \lambda)\), 然后对所有可能的状态序列求和, 得到 \(P(O \mid \lambda)\) 。 状态序列 \(I=\left(i_1, i_2, \cdots, i_T\right)\) 的概率是:
\[ P(I \mid \lambda)=\pi_{i_1} a_{i_1 i_2} a_{i_2 i_3} \cdots a_{i_{T-1} i_T} \]
对固定的状态序列 \(I=\left(i_1, i_2, \cdots, i_T\right)\), 观测序列 \(O=\left(o_1, o_2, \cdots, o_T\right)\) 的概率是:
\[ P(O \mid I, \lambda)=b_{i_1}\left(o_1\right) b_{i_2}\left(o_2\right) \cdots b_{i_T}\left(o_T\right) \]
\(O\) 和 \(I\) 同时出现的联合概率为
\[ \begin{aligned} P(O, I \mid \lambda) &=P(O \mid I, \lambda) P(I \mid \lambda) \\\\ &=\pi_{i_1} b_{i_1}\left(o_1\right) a_{i_1 i_2} b_{i_2}\left(o_2\right) \cdots a_{i_{T-1} i_T} b_{i_T}\left(o_T\right) \end{aligned} \]
然后, 对所有可能的状态序列 \(I\) 求和, 得到观测序列 \(O\) 的概率 \(P(O \mid \lambda)\), 即
\[ \begin{aligned} P(O \mid \lambda) &=\sum_I P(O \mid I, \lambda) P(I \mid \lambda) \\\\ &=\sum_{i_1, i_2, \cdots, i_T} \pi_{i_1} b_{i_1}\left(o_1\right) a_{i_1 i_2} b_{i_2}\left(o_2\right) \cdots a_{i_{T-1} i_T} b_{i_T}\left(o_T\right) \end{aligned} \]
这种算法复杂度太高,计算量太大,有效算法为前向算法和后向算法。
前向算法
首先定义前向概率。 给定隐马尔可夫模型 \(\lambda\), 定义到时刻 \(t\) 部分观测序列为 \(o_1, o_2, \cdots, o_t\) 且状态为 \(q_i\) 的概率为前向概率, 记作
\[ \alpha_t(i)=P\left(o_1, o_2, \cdots, o_t, i_t=q_i \mid \lambda\right) \]
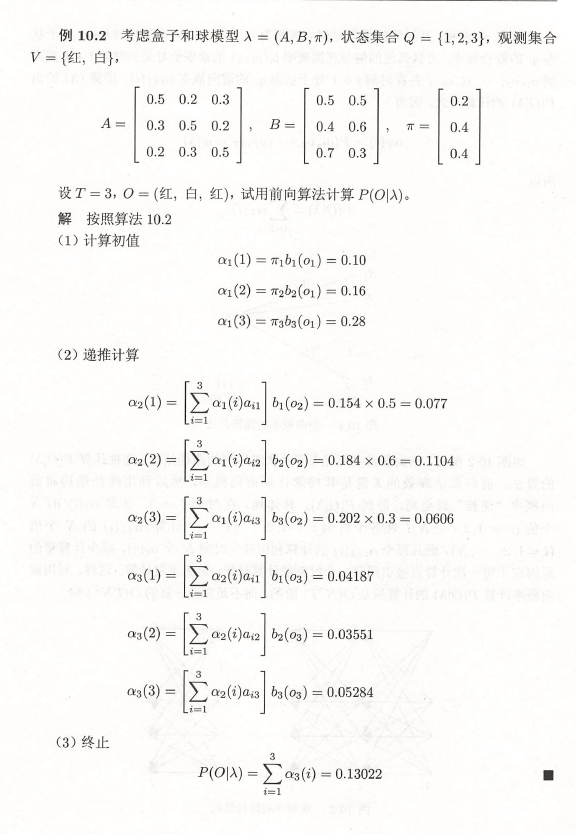
可以递推地求得前向概率 \(\alpha_t(i)\) 及观测序列概率 \(P(O \mid \lambda)\) 。 (观测序列概率的前向算法) 输入: 隐马尔可夫慔型 \(\lambda\), 观测序列 \(O\); 输出: 观测序列概率 \(P(O \mid \lambda)\) 。 (1) 初值
\[ \alpha_1(i)=\pi_i b_i\left(o_1\right), \quad i=1,2, \cdots, N \]
(2)递推 对 \(t=1,2, \cdots, T-1\),
\[ \alpha_{t+1}(i)=\left[\sum_{j=1}^N \alpha_t(j) a_{j i}\right] b_i\left(o_{t+1}\right), \quad i=1,2, \cdots, N \]
- 终止
\[ P(O \mid \lambda)=\sum_{i=1}^N \alpha_T(i) \]
前向算法, 步骤 (1) 初始化前向概率, 是初始时刻的状态 \(i_1=q_i\) 和观测 \(o_1\) 的 联合概率。步骤 (2) 是前向概率的递推公式, 计算到时刻 \(t+1\) 部分观测序列为 \(o_1, o_2, \cdots, o_t, o_{t+1}\) 且在时刻 \(t+1\) 处于状态 \(q_i\) 的前向概率, 如图 \(10.1\) 所示。在式 (10.16) 的方括弧里, 既然 \(\alpha_t(j)\) 是到时刻 \(t\) 观测到 \(o_1, o_2, \cdots, o_t\) 并在时刻 \(t\) 处于状态 \(q_j\) 的前向概率, 那么乘积 \(\alpha_t(j) a_{j i}\) 就是到时刻 \(t\) 观测到 \(o_1, o_2, \cdots, o_t\) 并在时刻 \(t\) 处于 状态 \(q_j\) 而在时刻 \(t+1\) 到达状态 \(q_i\) 的联合概率。对这个乘积在时刻 \(t\) 的所有可能的 #### 统计学习方法中前向算法的例子
 ### 后向算法 给定隐马尔可夫模型 \(\lambda\), 定义在时刻 \(t\) 状态为 \(q_i\) 的条件下, 从 \(t+1\) 到 \(T\) 的部分观测序列为 \(o_{t+1}, o_{t+2}, \cdots, o_T\)
的概率为后向概率, 记作
### 后向算法 给定隐马尔可夫模型 \(\lambda\), 定义在时刻 \(t\) 状态为 \(q_i\) 的条件下, 从 \(t+1\) 到 \(T\) 的部分观测序列为 \(o_{t+1}, o_{t+2}, \cdots, o_T\)
的概率为后向概率, 记作
\[ \beta_t(i)=P\left(o_{t+1}, o_{t+2}, \cdots, o_T \mid i_t=q_i, \lambda\right) \]
可以用递推的方法求得后向概率 \(\beta_t(i)\) 及观测序列概率 \(P(O \mid \lambda)\) 。 (观测序列概率的后向算法) 输入: 隐马尔可夫模型 \(\lambda\), 观测序列 \(O\); 输出: 观测序列概率 \(P(O \mid \lambda)\) 。 (1)
\[ \beta_T(i)=1, \quad i=1,2, \cdots, N \]
- 对 \(t=T-1, T-2, \cdots, 1\)
\[ \beta_t(i)=\sum_{j=1}^N a_{i j} b_j\left(o_{t+1}\right) \beta_{t+1}(j), \quad i=1,2, \cdots, N \]
后向算法到这一步只用到了第二个观测值,还有第一个观测值没有用到。 因此最后要乘上。 (3)
\[ P(O \mid \lambda)=\sum_{i=1}^N \pi_i b_i\left(o_1\right) \beta_1(i) \]
结合
利用前向概率和后向概率的定义可以将观测序列概率 \(P(O \mid \lambda)\) 统一写成
\[ P(O \mid \lambda)=\sum_{i=1}^N \sum_{j=1}^N \alpha_t(i) a_{i j} b_j\left(o_{t+1}\right) \beta_{t+1}(j), \quad t=1,2, \cdots, T-1 \]
也可以写成:
\[ P(O\mid \lambda) = \sum_{i=1}^N[\alpha_t(i)\beta_t(i)], \quad t=1,2,\cdots, T-1 \]
一些概率和期望问题
利用前向概率和后向概率, 可以得到关于单个状态和两个状态概率的计算公式。 1. 给定模型 \(\lambda\) 和观测 \(O\), 在时刻 \(t\) 处于状态 \(q_i\) 的概率。记
\[ \gamma_t(i)=P\left(i_t=q_i \mid O, \lambda\right) \]
可以通过前向后向概率计算。事实上,
\[ \gamma_t(i)=P\left(i_t=q_i \mid O, \lambda\right)=\frac{P\left(i_t=q_i, O \mid \lambda\right)}{P(O \mid \lambda)} \]
由前向概率 \(\alpha_t(i)\) 和后向概率 \(\beta_t(i)\) 定义可知:
\[ \alpha_t(i) \beta_t(i)=P\left(i_t=q_i, O \mid \lambda\right) \]
于是得到:
\[ \gamma_t(i)=\frac{\alpha_t(i) \beta_t(i)}{P(O \mid \lambda)}=\frac{\alpha_t(i) \beta_t(i)}{\sum_{j=1}^N \alpha_t(j) \beta_t(j)} \]
- 给定模型 \(\lambda\) 和观测 \(O\), 在时刻 \(t\) 处于状态 \(q_i\) 且在时刻 \(t+1\) 处于状态 \(q_j\) 的概 率。记
\[ \xi_t(i, j)=P\left(i_t=q_i, i_{t+1}=q_j \mid O, \lambda\right) \]
可以通过前向后向概率计算:
\[ \xi_t(i, j)=\frac{P\left(i_t=q_i, i_{t+1}=q_j, O \mid \lambda\right)}{P(O \mid \lambda)}=\frac{P\left(i_t=q_i, i_{t+1}=q_j, O \mid \lambda\right)}{\sum_{i=1}^N \sum_{j=1}^N P\left(i_t=q_i, i_{t+1}=q_j, O \mid \lambda\right)} \]
而
\[ P(i_t=q_i,i_{t+1}=q_j,O | \lambda) = \alpha_t(i)a_{ij}b_j(o_{t+1})\beta_{t+1}(j) \]
所以
\[ \xi_t(i, j)=\frac{\alpha_t(i) a_{i j} b_j\left(o_{t+1}\right) \beta_{t+1}(j)}{\sum_{i=1}^N \sum_{j=1}^N \alpha_t(i) a_{i j} b_j\left(o_{t+1}\right) \beta_{t+1}(j)} \]
- 将 \(\gamma_t(i)\) 和 \(\xi_t(i, j)\) 对各个时刻 \(t\) 求和, 可以得到一些有用的期望值。
- 在观测 \(O\) 下状态 \(i\) 出现的期望值:
\[ \sum_{t=1}^T \gamma_t(i) \]
(2)在观测 \(O\) 下由状态 \(i\) 转移的期望值:
\[ \sum_{t=1}^{T-1} \gamma_t(i) \]
- 在观测 \(O\) 下由状态 \(i\) 转移到状态 \(j\) 的期望值:
\[ \sum_{t=1}^{T-1} \xi_t(i, j) \]
预测问题
近似算法
近似算法的想法是, 在每个时刻 \(t\) 选择在该时刻最有可能出现的状态 $i_t^* $, 从而得 到一个状态序列 \(I^* =\left(i_1^* , i_2^* , \cdots, i_T^* \right)\), 将它作为预测的结果。 给定隐马尔可夫模型 \(\lambda\) 和观测序列 \(O\), 在时刻 \(t\) 处于状态 \(q_i\) 的概率 \(\gamma_t(i)\) 是
\[ \gamma_t(i)=\frac{\alpha_t(i) \beta_t(i)}{P(O \mid \lambda)}=\frac{\alpha_t(i) \beta_t(i)}{\sum_{j=1}^N \alpha_t(j) \beta_t(j)} \]
在每一时刻 \(t\) 最有可能的状态 $i_t^* $ 是
\[ i_t^* =\arg \max_{1 \leqslant i \leqslant N}\left[\gamma_t(i)\right], \quad t=1,2, \cdots, T \]
从而得到状态序列 \(I^* =\left(i_1^* , i_2^* , \cdots, i_T^* \right)\) 。 近似算法的优点是计算简单, 其缺点是不能保证预测的状态序列整体是最有可能 的状态序列, 因为预测的状态序列可能有实际不发生的部分。事实上, 上述方法得到 的状态序列中有可能存在转移概率为 0 的相邻状态, 即对某些 \(i, j, a_{i j}=0\) 时。尽管 如此, 近似算法仍然是有用的。
近似算法就是一种贪心的算法,每个时刻都取最有可能的状态,但整体序列并不一定是最优解。
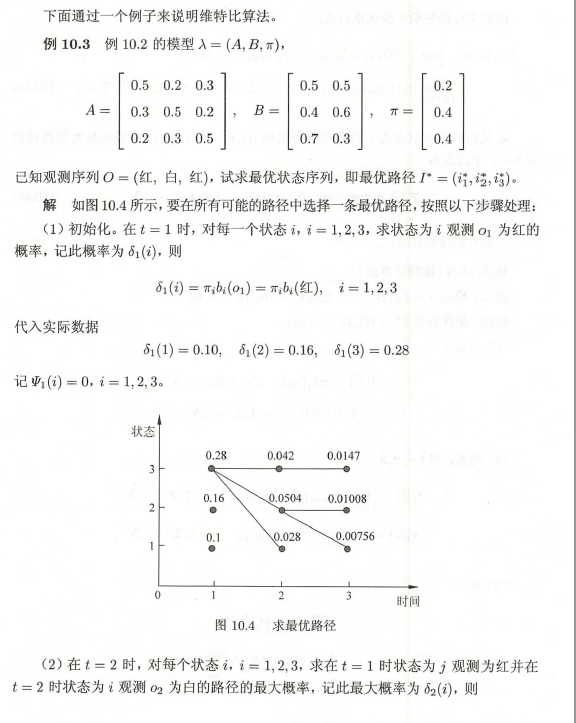
维特比算法
维特比算法实际上是用动态规划解隐马尔科夫模型预测问题,用动态规划求解概率最大路径,一条路径对应着一条状态序列。
首先导入两个变量 \(\delta\) 和 \(\Psi\) 。定义在时刻 \(t\) 状态为 \(i\) 的所有单个路径 \(\left(i_1, i_2, \cdots, i_t\right)\) 中概率最大值为
\[ \delta_t(i)=\max_{i_1, i_2, \cdots, i_{t-1}} P\left(i_t=i, i_{t-1}, \cdots, i_1, o_t, \cdots, o_1 \mid \lambda\right), \quad i=1,2, \cdots, N \]
后面的部分与前向算法的部分有点类似。
由定义可得变量 \(\delta\) 的递推公式:
\[ \begin{aligned} \delta_{t+1}(i) &=\max_{i_1, i_2, \cdots, i_t} P\left(i_{t+1}=i, i_t, \cdots, i_1, o_{t+1}, \cdots, o_1 \mid \lambda\right) \\\\ &=\max_{1 \leqslant j \leqslant N}\left[\delta_t(j) a_{j i}\right] b_i\left(o_{t+1}\right), \quad i=1,2, \cdots, N ; \quad t=1,2, \cdots, T-1 \end{aligned} \]
定义在时刻 \(t\) 状态为 \(i\) 的所有单个路径 \(\left(i_1, i_2, \cdots, i_{t-1}, i\right)\) 中概率最大的路径的 第 \(t-1\) 个结点为
\[ \Psi_t(i)=\arg \max_{1 \leqslant j \leqslant N}\left[\delta_{t-1}(j) a_{j i}\right], \quad i=1,2, \cdots, N \]
可以简单理解为找到使得从t-1的j到t的i式子\(\delta_{t-1}(j)a_{ji}\)最大的j,也就是说\(\Psi_t(i)\)代表t-1时刻的最佳状态值,如果t时刻的最佳状态值是i的话,那么t-1时刻的最佳状态值就是\(\Psi_t(i)\),后面回溯要用到
下面介绍维特比算法。
输入: 模型 \(\lambda=(A, B, \pi)\) 和观测 \(O=\left(o_1, o_2, \cdots, o_T\right)\); 输出: 最优路径 \(I^* =\left(i_1^* , i_2^* , \cdots, i_T^* \right)\) 。 (1)初始化
\[ \begin{gathered} \delta_1(i)=\pi_i b_i\left(o_1\right), \quad i=1,2, \cdots, N \\\\ \Psi_1(i)=0, \quad i=1,2, \cdots, N \end{gathered} \]
前者和前向算法的初始化是一样的。
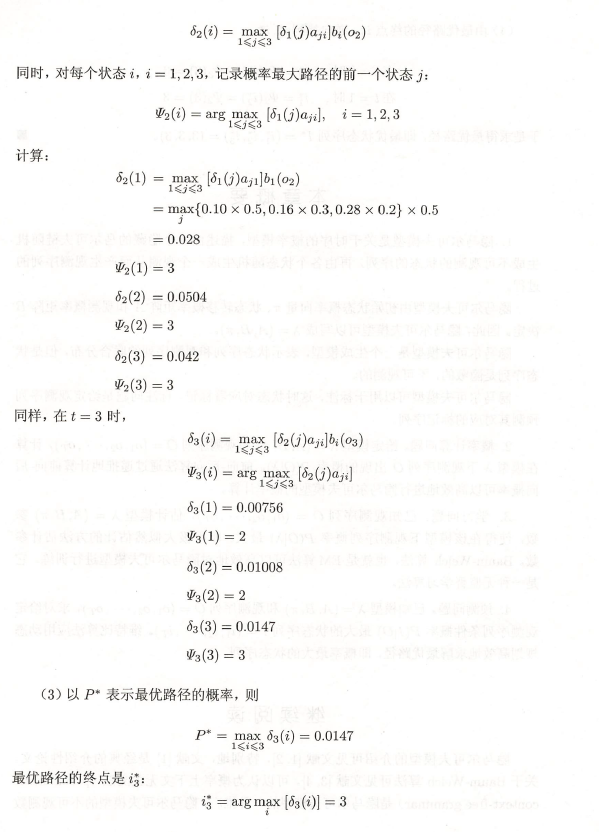
- 递推。对 \(t=2,3, \cdots, T\)
\[ \begin{array}{ll} \delta_t(i)=\max_{1 \leqslant j \leqslant N}\left[\delta_{t-1}(j) a_{j i}\right] b_i\left(o_t\right), \quad i=1,2, \cdots, N \\\\ \Psi_t(i)=\arg \max_{1 \leqslant j \leqslant N}\left[\delta_{t-1}(j) a_{j i}\right], \quad i=1,2, \cdots, N \end{array} \]
- 终止
\[ \begin{gathered} P^* =\max_{1 \leqslant i \leqslant N} \delta_T(i) \\\\ i_T^* =\arg \max_{1 \leqslant i \leqslant N}\left[\delta_T(i)\right] \end{gathered} \]
这里得到的是最后一个时刻的最佳状态值,然后进行回溯。
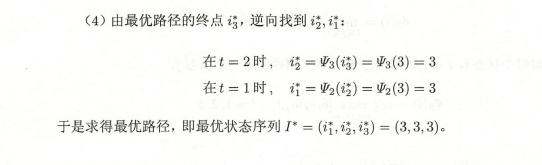
- 最优路径回溯。对 \(t=T-1, T-2, \cdots, 1\)
\[ i_t^* =\Psi_{t+1}\left(i_{t+1}^* \right) \]
求得最优路径 \(I^* =\left(i_1^* , i_2^* , \cdots, i_T^* \right)\) 。
书上的例子
看一个例子就很容易理解了
 #### 代码
#### 代码
def viterbi(obs, states, start_p, trans_p, emit_p):
V = [{}] # 列表idx代表时间t,字典的键代表状态值,值代表概率
path = {} # 最佳路径
for y in states:
V[0][y] = start_p[y] * emit_p[y].get(obs[0], 1e-5)
path[y] = [0] # 都初始化为0
for t in range(1, len(obs)):
V.append({})
for y in states:
em_p = emit_p[y].get(obs[t], 1e-5) # 取出观测值对应的概率
(prob, state) = max([(V[t-1][y0]*trans_p[y0][y]*em_p, y0) for y0 in states])
V[t][y] = prob
path[y] = path[y] + [state] # 记录路径,state是当前时间t状态为y时t-1的最佳状态,也就是从state转移到y的概率最大。如果最后时刻的最佳状态是y,则回溯从y开始,最后的状态也是y。
(prob, state) = max((V[len(obs)-1][y], y) for y in states) # 求最后时刻的最大概率和状态。
return path[state][1:] + [state] # 初始状态是0,所以去掉第一个0,再加上最后时刻的最大概率的状态,结果就是最佳路径。这里键对值的过程相当于回溯了。
A = {
0 : {0:0.5, 1:0.2, 2:0.3},
1 : {0:0.3, 1:0.5, 2:0.2},
2 : {0:0.2, 1:0.3, 2:0.5}
}
B = {
0: {'红': 0.5, '白': 0.5},
1: {'红': 0.4, '白': 0.6},
2: {'红': 0.7, '白': 0.3}
}
π = {0:0.2, 1:0.4, 2:0.4}
viterbi(['红', '白', '红'], [0, 1, 2], π, A, B)拿上面的例子进行实验,思路是完全按照李航老师书的思路来的。还是比较容易理解的,只是回溯的实现不太一样,这个严格来说不能叫做回溯。
学习算法
参考
《统计学习方法》李航
https://www.52nlp.cn/hmm-learn-best-practices-one-introduction