梯度累计
梯度累积使我们能够通过按顺序处理较小的批次来扩展到更大的有效批次。我们不是一次计算整个批次的梯度(这需要将所有激活存储在内存中),而是在更新模型参数之前将每个小批次的梯度相加。这减少了内存使用量,但需要更多的向前/向后传递。
代码
loss = loss / gradient_accumulation_stepsloss.backward()
if step% gradient_accumulation_steps == 0:
optimizer.step()
optimizer.zero_grad()
step+=1gradient_accumulation_steps 是梯度累积次数,累积几次,原本的 loss 就要除以几,这是为了对多个批次的数据的梯度做累积。
有人说,应该有这一行代码才算累加
losses += loss这样理解是错误的。
要明白最重要的一点是,梯度累加,累加的并不是损失,而是根据损失得到的梯度。
梯度累计如何节省显存
减少瞬时激活值显存:每次仅处理小批量的数据,激活值显存占用降低为原来的
1/k(例如k=4时,显存占用降至 25%)。复用显存:每次小批量计算完成后,释放当前激活值显存,供下一次计算使用(显存占用峰值始终为小批量对应的量)。
梯度显存不变:模型参数和梯度的显存占用与批量大小无关,因此不受影响(但需额外存储累积梯度的变量,这部分开销极小)。
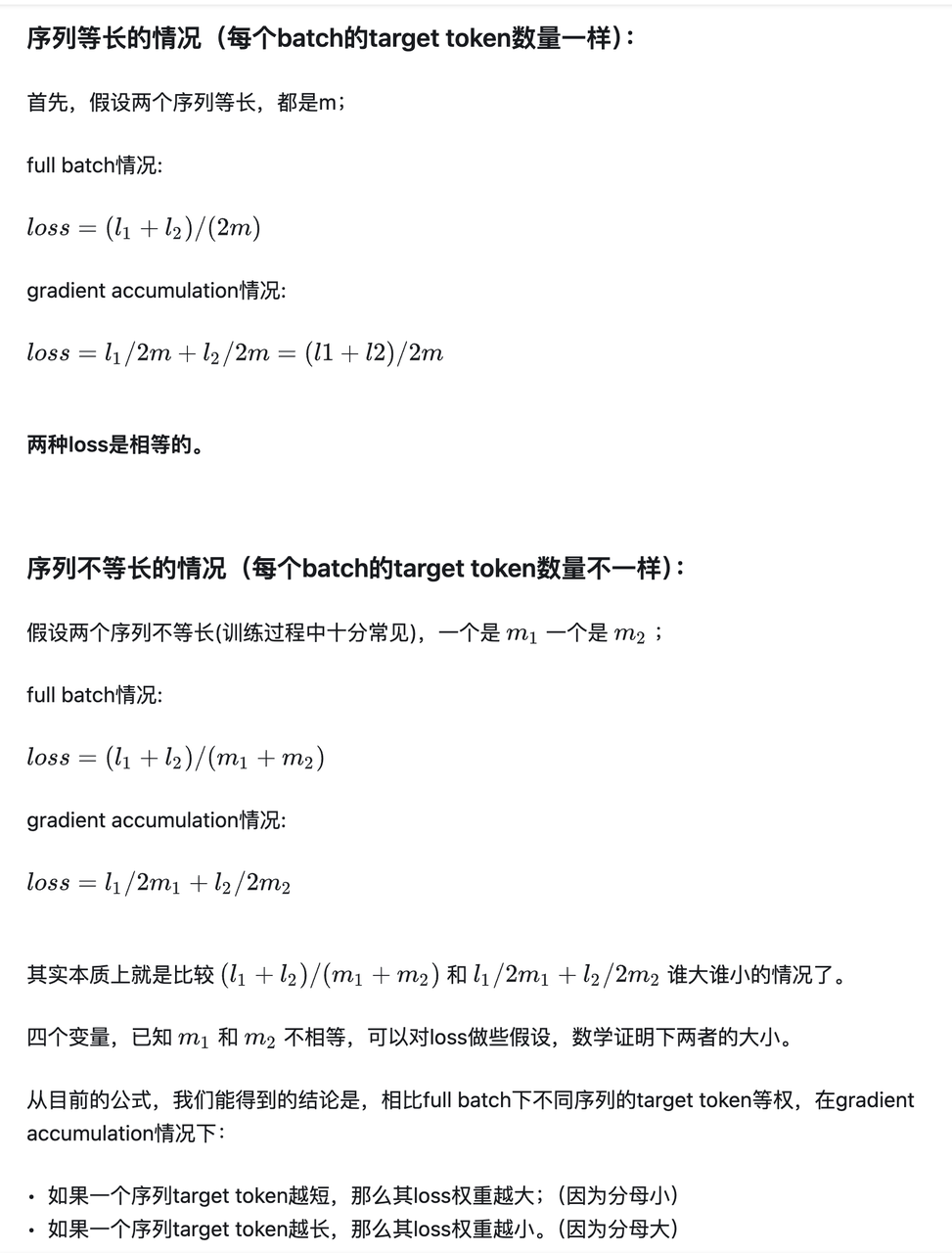
梯度累积两次,跟 batch size 增大 2 倍,在多数情况下,效果一样吗?(loss 的 3 次平均)
理论上,梯度累计在数学上应该等同于全批量训练,但实际发现 loss 并不匹配。( Gradient accumulation yields worse results than the equivalent batch size · Issue #2175 · huggingface/trl)
一般情况下,loss 计算会经历三次平均
micro batch 维度,分母是这个 micro batch 中的所有 label 不是 -100 的 token 数(不同 token 之间 loss 的平均)
DP 维度,分母是 DP size (和 GPU 数量相关,不同机器之间 loss 的平均)
梯度累加维度,分母是梯度累加数。(不同 batch 之间的 loss 的平均)